
Pour l’instant, les Blinky Blocks ne communiquent qu’avec leurs voisins directs mais l’objectif à terme est que, chaque robot puisse communiquer par onde radio avec tous les autres (potentiellement très nombreux) du réseau. Cependant dans cette hypothèse, dans un réseau de 10 000 robots, si chaque composant envoie simultanément un message à tous les autres, pour connaître leurs positions par exemple, ça risque de coincer. Un peu comme lorsque tous les étudiants d’un amphi tentent de se connecter à une seule borne wifi !
Les chercheurs tentent donc d’adapter les algorithmes pour réguler l’émission et la transmission de messages. Et plutôt que de travailler avec des milliers de robots, ils utilisent des logiciels qui leur permettent de simuler différents scénarii. Par exemple celui d’un robot qui enverrait un message aux 50 appareils qui l’entourent, qui eux-mêmes relayeraient la communication à 50 autres robots… jusqu’à ce que tout le réseau ait eu l’information.
Le logiciel donne alors une visualisation de la diffusion du message selon la situation initiale et l’algorithme testé. Si les points verts deviennent jaunes c’est que le réseau de robots sature !
Exemple de 2 simulations (avec 2 algorithmes différents), de transmission de message dans un réseau composé de nombreuses machines. Ces tests d’algorithmes sont réalisés avec le logiciel BitSimulator créé et utilisé par les chercheurs de l’équipe OMNI.
Exemple d’un programme ou les Blinky Blocks s’allument pour remplir la grille en suivant les règles du sudoku au fur et à mesure que des couleurs sont attribuées à certains Blinky Blocks.
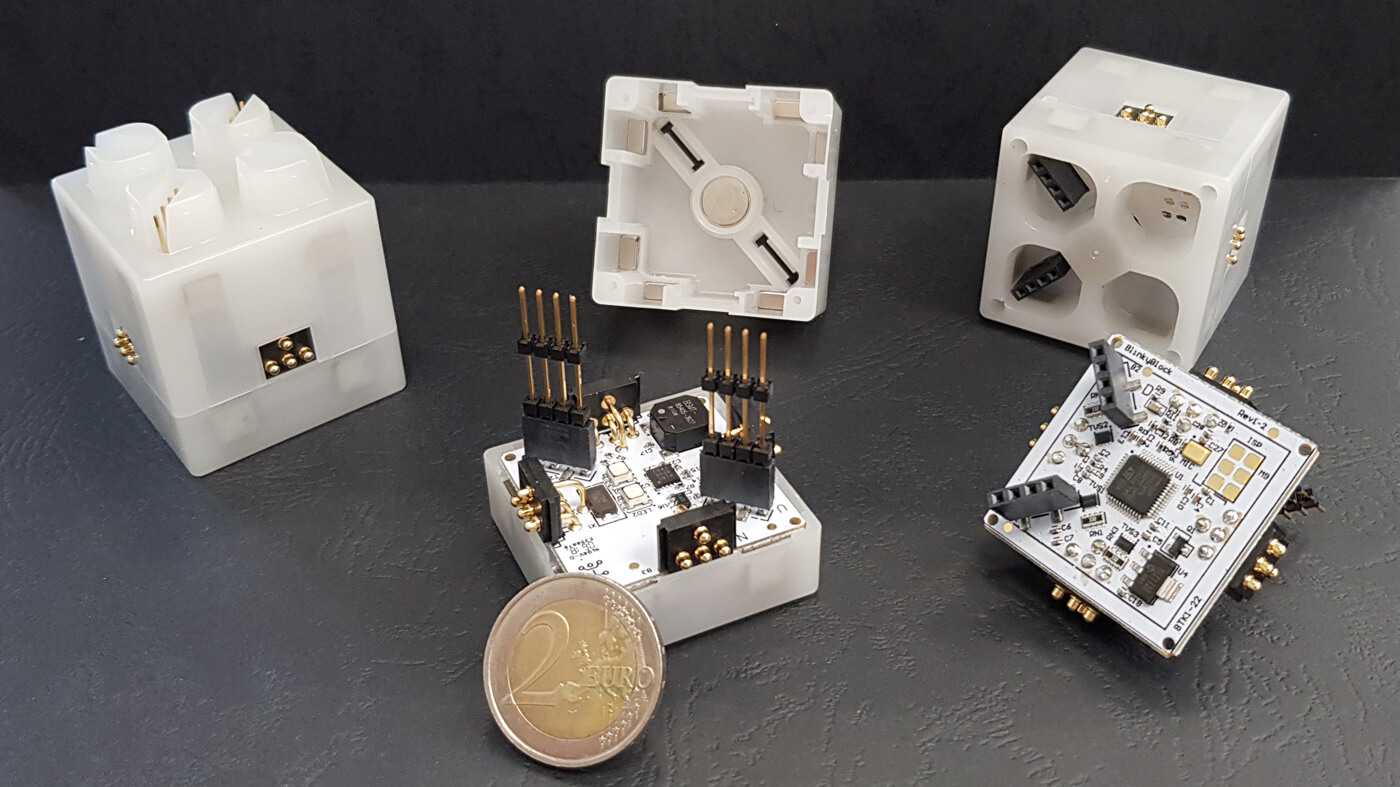
Crédit : UFC Laboratoire Femto-ST



Des micro-robots auto-assemblables et fonctionnant en réseau auraient de multiples applications. Ils permettraient par exemple de reconstituer des organes en 3D sur lesquels des chirurgiens pourraient s’entraîner avant leurs opérations.
